Robot Car V2 kit - 組み立て編 -
昨日、ワクチン接種も2回目が完了し、本日は「ワクチン接種休暇」。。。 ということで、しばらく保管してあったRobot Carを予定通り作りたい。
使うのは、 OSOYOO Robot Car V2 Kit / ROBOT CARE STARTER KIT
今売っているのは、2.1。

まずは、基本の通り組み立てから。
各機器の設置
ステップ1: 上部と下部のシャーシに貼っている保護フィルムをはがす。
・綺麗に剥がれる。
ステップ2: 以下のように4つのモーターユニットをモーターホルダーに取り付けます。

・ナット1個の溝が切れてなく入れられない。一旦そのまま進む。(戻ってきて、M3 Nuts 5個入りと1個交換してつける)

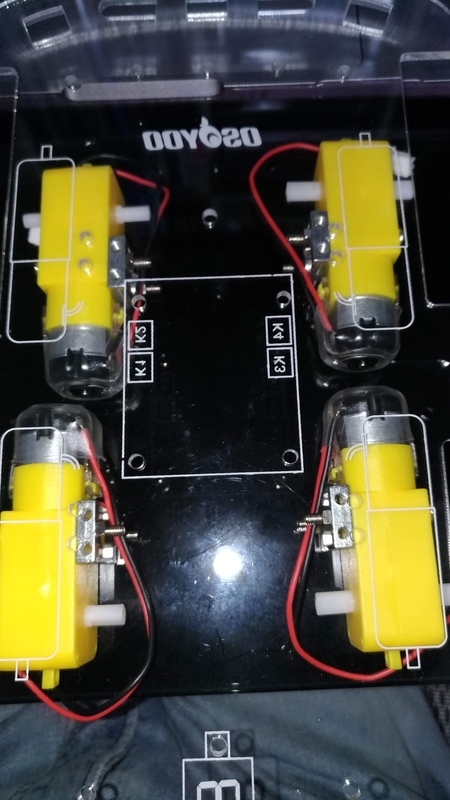
ステップ3: 金属製のモーター固定板に付属しているM3*8ネジを使用して、4個のモーターユニットを下部シャーシに取り付けます。
ステップ4: モータードライバボードを4本のM2.5プラスチックネジ・ナットと、六角柱を使用して下部シャーシに取り付けます (下記図を確認して正しい方向に取り付けます)。

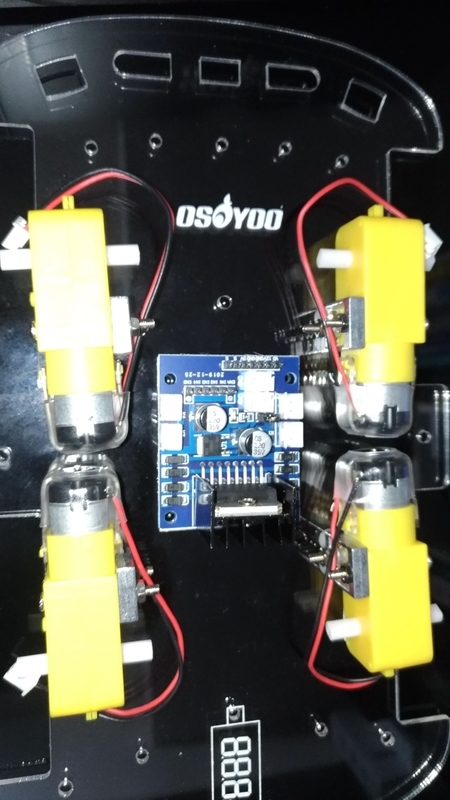
・ナットーシャーシー六角中ーモータドラバボードーネジ の層になるように取り付けする。
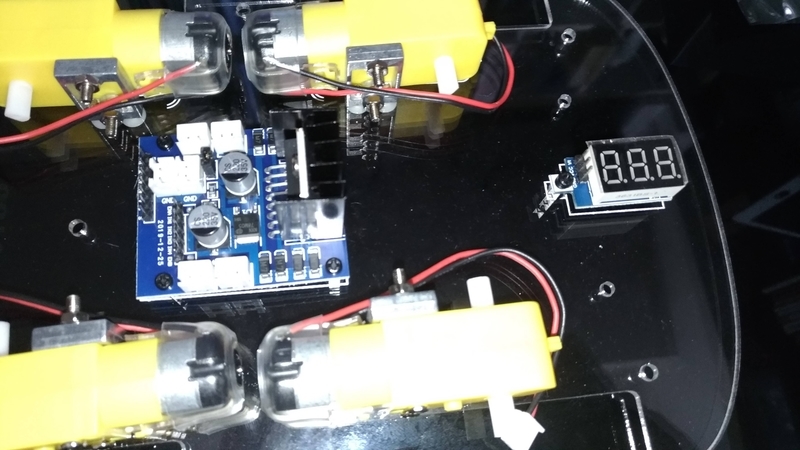
ステップ5: 下部シャーシに、2本のM2.5プラスチックネジ・ナットと、六角柱を使用して電圧計を取り付けます。


・つけた
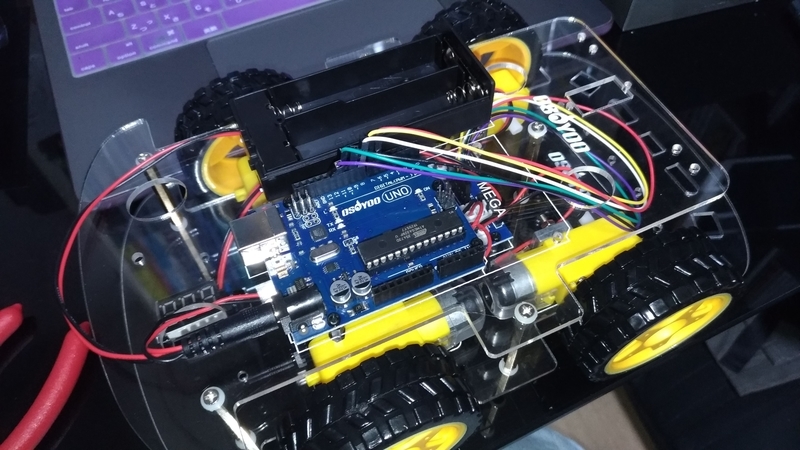
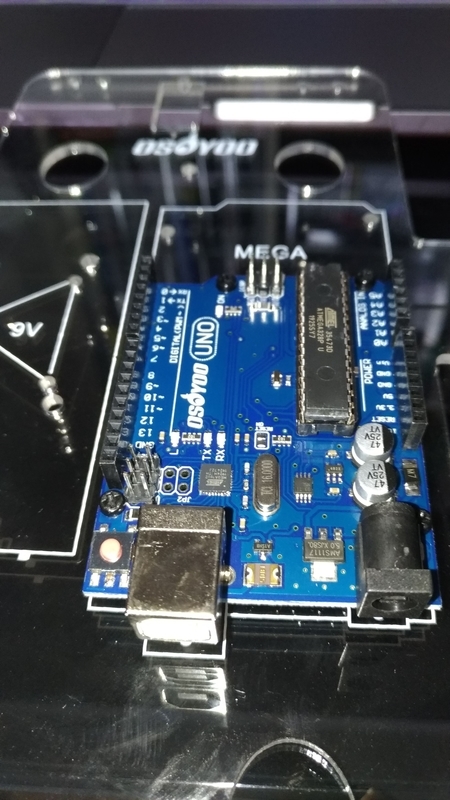
ステップ6: 上部シャーシに4本のM2.5プラスチックネジ・ナットと、六角柱を使用してArduino UNOボードを取り付けます(取り付けの際は下記図を確認して、ボードの向きを確認してください)。
・ボードの裏表さえ間違えなければ、もう手馴れたものです。
ステップ7: このキットには18650用と9V用の2種類の電池ケースがついていますが、基本的に18650用をお勧めしています。取り付けは4本のM3*10ネジとナットを使用して上部シャーシに取り付けます。
・18650用を装着

配線の接続
ステップ1: 下記図に従って、モータードライバボードK1~K4ソケットに4個のモーターユニットを接続します。
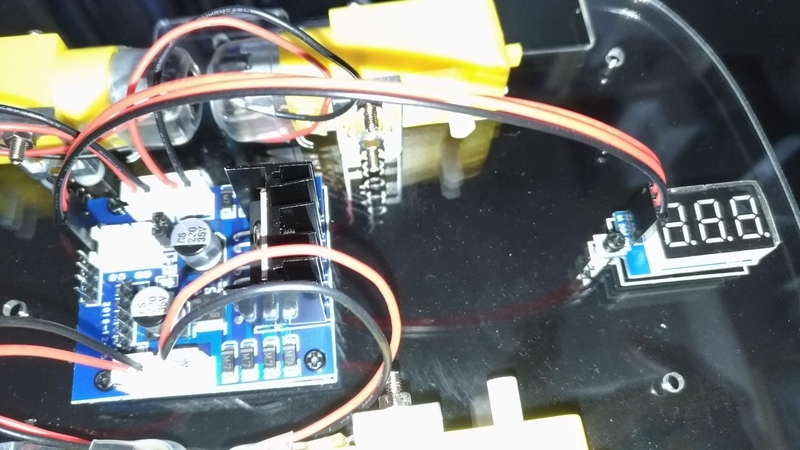
ステップ2: 下記図に従って、電圧計とモータードライバボードを、3ピン(メス~メス)ジャンパワイヤで接続します。
・図の向きが違うが気にせずつける。
ステップ3: 下記図に従って、UNOボードのD6、D7、D8、D9、D11、D12と、モータードライバボードを6ピン(メス~オス)ジャンパワイヤで接続します(ピンはサンプルコードconfiguration.hファイルで定義されています)。

・(後日)ステップ5で確認できるが、ケーブル配線は穴を通すことになる。
ステップ4: 下記図に従って、Unoボード、モータードライバボード、電池ケース(18650電池または9V用の電池ケース)を接続します
・電源のケーブルですね。

ステップ5: 上部と下部シャーシに挟むように5本の銅柱を接続します。接続には10本のM3*ネジとゴムスペーサで上下から固定した後、4本のタイヤをモータードライバに取り付けます。
・穴通しているので、配線し直し。 ・タイヤをつけたら一気に車らしくなった。