Robot Car V2 kit - 赤外線リモコンでロボットカーを制御 -
赤外線リモコンでロボットカーを制御
各機器の設置と接続
ステップ1: レッスン2以降の内容は、全てレッスン1における車体の完成が必要になりますので、まずレッスン1を完成させましょう。
ステップ2: 赤外線受信機を2本のM2.5*10プラスチックネジ、ナット、六角柱を使用して、上部シャーシの前面に取り付けます。
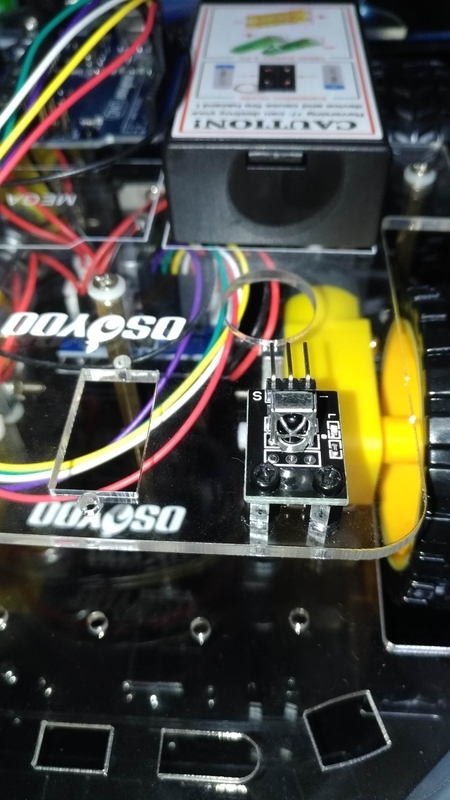
ステップ3: 下記図のように、5VをVCC端子に、D10をS端子に、GNDを-/GND端子に接続します (レッスン1で接続した配線はそのまま使用するので、外さないようにしてください) 。
Arduino <-> 赤外線センサ
D10 <-> "S"
5V <-> "VCC" 電源
GND <-> "-" GND

動作確認
ステップ1、2は省略
ステップ3: レッスン2のソースをダウンロードします。https://osoyoo.com/driver/v2smartcar-lesson2.zip からソースをダウンロードするとzipファイルなので、解凍するとsmartcar-lesson2というフォルダが表示されます。
ステップ4: UNOボードとPCをUSBケーブルで接続し、Arduino IDEを開きます。開いたらファイルをクリック – >開くをクリック – > smartcar-lesson2フォルダ内のコード「v2smartcar-lesson2.ino」を選択し、ソースコードをarduinoにロードします。
v2smartcar-lesson2:11:10: fatal error: IRremote.h: No such file or directory
#include <IRremote.h>
^~~~~~~~~~~~
compilation terminated.
exit status 1
IRremote.h: No such file or directory
IRremoteがないということなので、Tools>Manage Libraries からIRremoteを取得

リモコンに電源も入っており便利。 ボタン操作ごとにタイヤが動くので使い勝手は悪いですね。